1.MotoPlus
当您对机器人系统文件不熟悉时,可以通过MotoPlus ——一个机器人控制器二次开发的平台,使用平台提供的接口可以实现相应的功能。在MotoPlus中,您可以为天机机器人下达各种指令,天机机器人会根据您下达的指令执行不同的动作。
MotoPlus 介绍
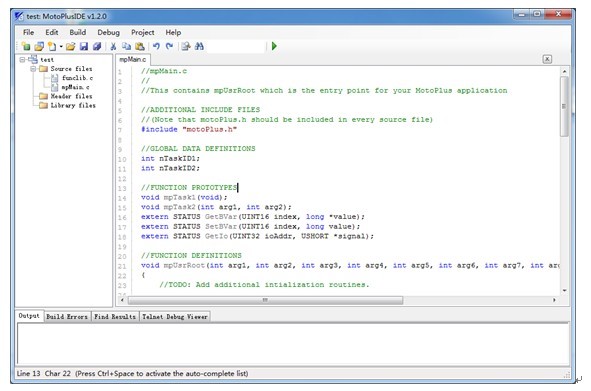
MotoPlus是一个专业的集成开发环境,利用C语言在MotoPlusIDE文本编辑器中编写代码,然后编译链接成可执行程序,安装到机器人控制柜中,可作为一个任务在机器人内执行。机器人上电后,储存在CF卡上的MotoPlusApI应用程序,自动导入到机器人内存中,和系统程序同时执行。图2为MotoPlus开发环境。
上图: MotoPlus开发环境
MotoPlus应用程序是以任务的形式启动的,一个应用程序可以是单任务的,也可以是多任务的,可以同时启动,也可以在任务内单独调用。任务可以有多种状态,运行,睡眠,等待等。根据任务的不同,还可以设置不同的优先级。不同任务间可以通过信号或事件进行信息交互。MotoPlus的API提供的功能包括:任务控制,机器人控制,JOB控制,IO控制,网络通信控制,事件,串口通信控制等。通过这些功能,可以通过视觉传感器或其他传感器的数据动态调整机器人的位置,通过网络通信实现机器人与外部PC的数据传输或者实现机器人程序的顺序控制。MotoPlus的开发工具:MotoPlusIDEMotoPlus的特点:(1)执行速度快:应用程序嵌入到了机器人系统中,就像CPU上的原生代码一样,所以执行速度很快。(2)减少硬件配置:通过MotoPlus提供的网络通讯端口和RS232串口通讯端口,用户可以直接建立机器人与外部传感器的连接,与传统的MOTOCOM32通讯方式相比,减少了一台计算机的配置。(3)编程简单:使用C语言丰富的标准库以及MotoPlus提供的API函数集,不需要调整机器人控制柜的源代码便可开发出各种应用程序。例如:读取机器人变量的函数:LONG mpGetVarData(MP_VAR_INFO* sData, LONG * rData, LONG num)参数:sData:指向变量数据结构的指针rData:指向变量数据的指针num:变量数据的个数返回值:0:正常结束-1:错误
2、MotoSim EG-VRC
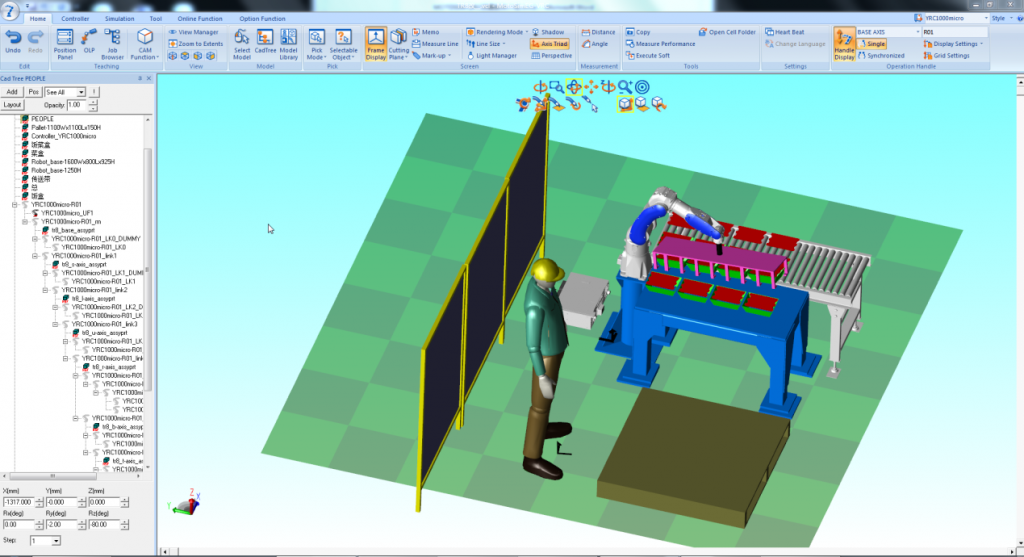
工业机器人的示教分为在线示教与虚拟示教两种,天机机器人的MotoSim EG-VRC软件可以直观、便捷的实现工业机器人的虚拟示教过程。1.模拟真实的机器人工作现场环境,精准的3D模型导入利于机器人和周边设备合理的布局
2.自动生成路径,节省工人调试时间和成本,提高效率
3.模拟仿真,机器人的动作范围以及周期节拍
4.与真实的机器人通信,可以进行监控,程序保存备份,参数设定
MotoSim EG-VRC介绍
结合了在安川MotoSimEG当中NX100、DX100控制器同等功能的虚拟机器人控制 (Virtual Robot Control-VRC)功能,以及能实现如同示教器一样操作和表示的虚拟示教器功能 (Virtual Program Pendant-VPP)功能。• 支持独立・协调功能(协调功能・双腕机器人)• 简化操作(与实际示教器同样的操作方法)• 机器人程序命令的编辑・执行功能强化• 各种条件文件、变量的编辑可能• 各种信号的模拟• 系统配置功能• 实现高精度节拍(Cycle Time)计算(与MotoSimEG一致)MotoSimEG-VRC中,控制柜型号包括NX100、YRC1000、 DX100、DX200、FS100,TRCmicro