跳至正文
首页
产品中心
应用案例
服务支持
新闻资讯
关于我们
联系我们
CN
EN
导航菜单
导航菜单
首页
产品中心
应用案例
服务支持
新闻资讯
关于我们
联系我们
CN
EN
软件
软件
软件
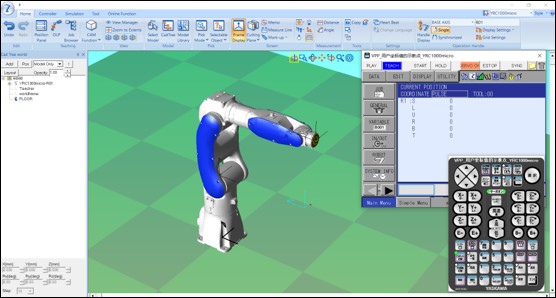
MotoSim离线仿真软件
基本介绍
拥有等同于控制器功能的虚拟机器人控制(Virtual Robot Control-VRC)功能,以及能实现如同示教器一样操作和表示的虚拟示教器功能 (VirtualProgramPendant-VPP)功能。
优势
可以在PC上,预先对工业机器人工作环境乃至生产过程进行模拟仿真,将工业机器人的运动方式以动画的方式显示出来,直观地显示工业机器人及整个生产线的运动情况,能够有效地辅助设计人员进行工业机器人虚拟示教、工业机器人工作站布局、工业机器人工作姿态优化等。
运行环境
操作系统:
Microsoft Windows XP Service Pack 2以上(32 bit版)、Windows 7 、10(32 bit版/64 bit版)
硬件要求:
CPU要求Intel® Core TM2 Duo 以上的双核处理器,内存2GByte 以上,硬盘空闲容量在1GByte以上,硬件密钥。
虚拟示教器
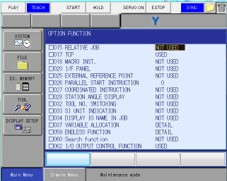
系统配置
各种IO信号模拟
可以编辑各类条件文件与变量
完善的机器人程序指令