

全力控人形臂
Marvin 系列
轻量化七自由度仿人手臂设计,如臂指使
让机器人像人类一样探索世界
Marvin系列,全关节力控仿生双臂。
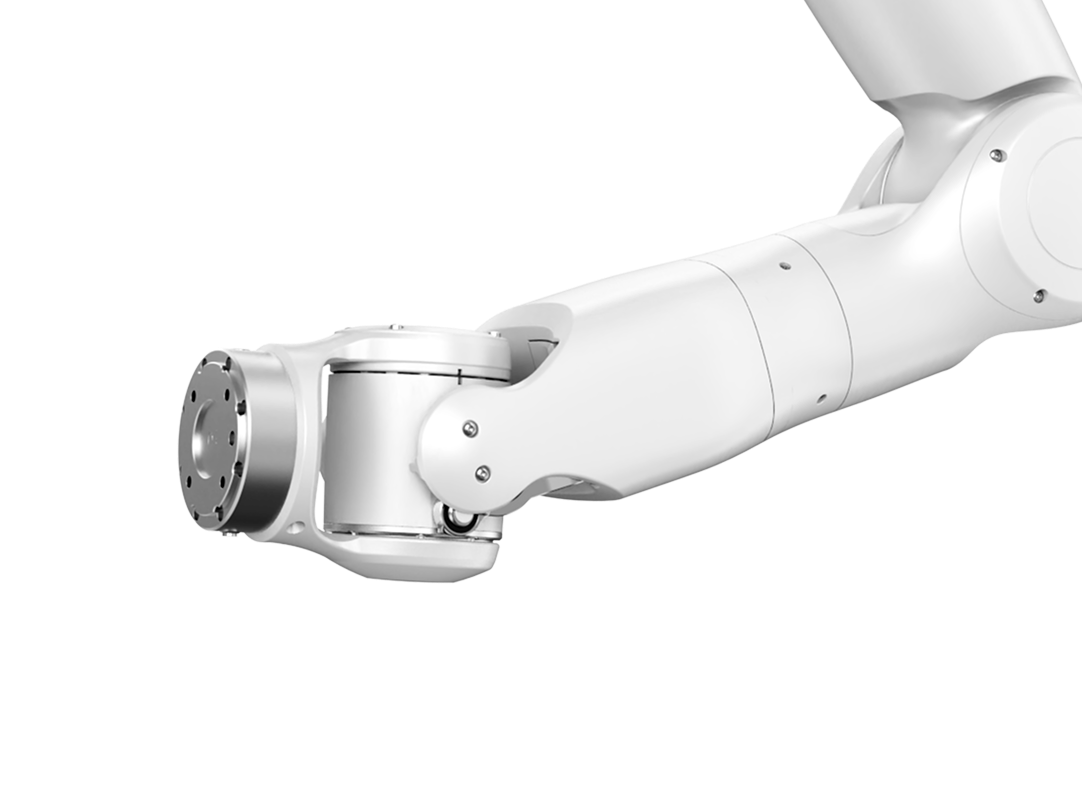
基于十字交叉轴仿生手腕与全关节扭矩传感,
实现真正拟人化运动与精准力控交互。

产品特性
Marvin Series
仿生十字轴手腕运动精准如人
突破性的十字交叉轴结构,运行特征和人体腕关节的生物力学结构相同,实现了真正的功能等效拟人化。大幅提升远程遥操作的精准度与场景适应性

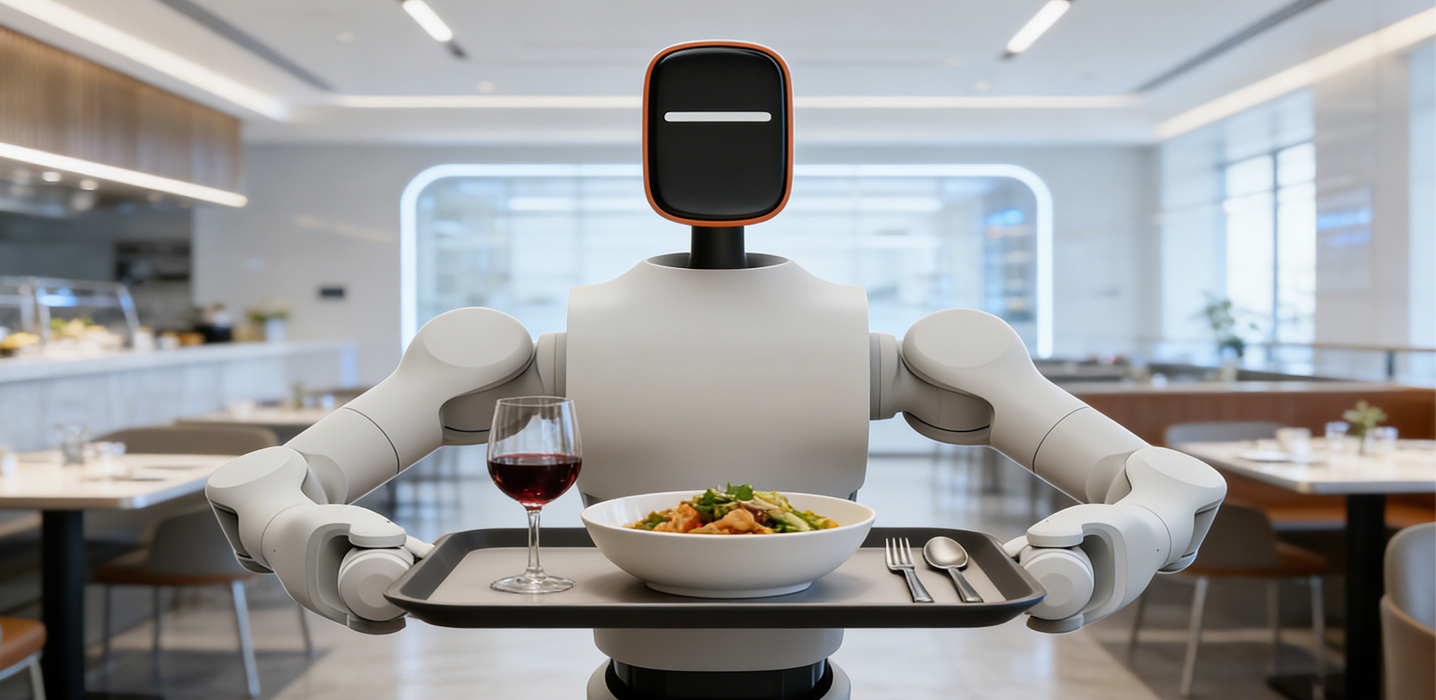
全力控架构,安全柔顺高精度扭矩传感器
支持全臂实时力感知与自适应阻抗调节,实现真正意义上的柔性交互。无需额外力传感器即可完成精装配、碰撞检测与人机安全协作。
内置走线,简洁高效
整机大中空结构支持相机线、电源线内置布局,避免
外部缠绕与剐蹭,提升运动自由度与环境适应性。可快速搭载
双目相机等高集成度设备,保持整体整洁。



扩展自由,配置丰富
多接口集成,支持灵巧手与多种执行器末端提供EtherCAT、CAN FD、RS485等通讯接口及大电流电源输出,可快速接入灵巧手、六维力传感器等外设,满足工业与科研的多样化需求。开放式的设计便于客户自定义扩展。
扩展自由,配置丰富
多接口集成,支持灵巧手与多种执行器末端提供EtherCAT、CAN FD、RS485等通讯接口及大电流电源输出,可快速接入灵巧手、六维力传感器等外设,满足工业与科研的多样化需求。开放式的设计便于客户自定义扩展。

扩展自由,配置丰富
多接口集成,支持灵巧手与多种执行器末端提供EtherCAT、CAN FD、RS485等通讯接口及大电流电源输出,可快速接入灵巧手、六维力传感器等外设,满足工业与科研的多样化需求。开放式的设计便于客户自定义扩展。

扩展自由,配置丰富
多接口集成,支持灵巧手与多种执行器末端提供EtherCAT、CAN FD、RS485等通讯接口及大电流电源输出,可快速接入灵巧手、六维力传感器等外设,满足工业与科研的多样化需求。开放式的设计便于客户自定义扩展。

扩展自由,配置丰富
多接口集成,支持灵巧手与多种执行器末端提供EtherCAT、CAN FD、RS485等通讯接口及大电流电源输出,可快速接入灵巧手、六维力传感器等外设,满足工业与科研的多样化需求。开放式的设计便于客户自定义扩展。
| 型号 | Marvin M6S
SRS-686 |
Marvin M6S
CCS-696 |
Marvin M6S Lite
CCS-615 |
Marvin M6S
CCS-809 |
Marvin M3S Long
CCS-920 |
Marvin M20S
CCS-1050 |
|
|---|---|---|---|---|---|---|---|
| 关节数量(单臂) | 7 | 7 | 7 | 7 | 7 | 7 | |
| 额定负载(单臂) | 6KG | 6KG | 5KG | 5KG | 3KG | 20KG | |
| 手腕构型 | 传统协作构型 | 十字交叉手腕 | 十字交叉手腕 | 十字交叉手腕 | 十字交叉手腕 | 十字交叉手腕 | |
| 工作半径 (J2轴线到末端法兰) |
686mm | 696mm | 615mm | 809mm | 920mm | 1050mm | |
| 本体重量(单臂) | 11.45KG | 12KG | 8KG | 12.7KG | 13.1KG | 30KG | |
| TCP最大速度 | 2m/s | 2m/s | 1.5m/s | 2m/s | 2m/s | 2m/s | |
| 重复定位精度 | ±0.03 | ±0.03 | ±0.03 | ±0.04 | ±0.04 | ±0.1 | |
| 关节扭矩传感器 | 各轴标配 | 各轴标配 | 各轴标配 | 各轴标配 | 各轴标配 | 各轴标配 | |
| 相机线 | 可内置到末端 | 可内置到末端 | 可内置到末端 | 可内置到末端 | 可内置到末端 | 可内置到末端 | |
| 作用力重复精度 | ≤0.15N,≤0.05N.m | ≤0.15N,≤0.05N.m | ≤0.15N,≤0.05N.m | ≤0.15N,≤0.05N.m | ≤0.15N,≤0.05N.m | ≤0.15N,≤0.05N.m | |
| 末端六维力传感器 | 支持选配 | 支持选配 | 支持选配 | 支持选配 | 支持选配 | 支持选配 | |
| 运动范围 | J1 | ±178° | ±178° | ±173° | ±178° | ±178° | ±170° |
| J2 | ±120° | ±120° | ±120° | ±120° | ±120° | ±120° | |
| J3 | ±178° | ±178° | ±173° | ±178° | ±178° | ±170° | |
| J4 | +60°/-145° | +60°/-145° | +45°/-145° | +60°/-145° | +60°/-145° | +60°/-145° | |
| J5 | ±178° | ±178° | ±173° | ±178° | ±178° | ±170° | |
| J6 | ±110° | ±60° | ±60° | ±60° | ±60° | ±60° | |
| J7 | ±178° | ±90° | ±90° | ±90° | ±90° | ±90° | |
| 关节速度 | J1 | 180°/s | 180°/s | 180°/s | 180°/s | 180°/s | 120°/s |
| J2 | 180°/s | 180°/s | 180°/s | 180°/s | 180°/s | 120°/s | |
| J3 | 180°/s | 180°/s | 180°/s | 180°/s | 180°/s | 180°/s | |
| J4 | 180°/s | 180°/s | 180°/s | 180°/s | 180°/s | 180°/s | |
| J5 | 180°/s | 180°/s | 180°/s | 180°/s | 180°/s | 180°/s | |
| J6 | 180°/s | 180°/s | 180°/s | 180°/s | 180°/s | 180°/s | |
| J7 | 180°/s | 180°/s | 180°/s | 180°/s | 180°/s | 180°/s | |
| 防护等级 | IP50 | IP50 | IP50 | IP50 | IP50 | IP65 | |
| 抱闸控制(制动方式) | 各轴标配抱闸 | 各轴标配抱闸 | J1-J4带抱闸 | 各轴标配抱闸 | 各轴标配抱闸 | 各轴标配抱闸 | |
| 电气指标(功耗) | 400W(平均) 600W(峰值) |
400W(平均) 600W(峰值) |
200W(平均) 400W(峰值) |
400W(平均) 600W(峰值) |
400W(平均) 600W(峰值) |
1000W(平均) 3800W(峰值) |
|
| 通讯方式 | EtherCAT通讯 | ||||||
| 通讯周期 | ≤1ms | ||||||
| 调试软件 | 配7个轴的上位机设置和调试可视化软件 | ||||||
| 编码器 | 双绝对值编码器 | ||||||
| 本体接口(末端手柄) | 拖动开启按键 | ||||||
| 本体接口(电源) | 电源24V(额定电流3A) | ||||||
| 本体接口(通讯) | RS485 、CAN FD、EtherCAT | ||||||
| 电气指标(工作电压范围) | 48V(±10%) | ||||||
| 认证指标 | CE认证、ISO/TS 15066,13849-1PLd(Cat.3),EN 60204-1-2018,EN IEC EN IEC 61000-6-2,
EN IEC 61000-6-4,EN ISO 12100:2010 |
||||||