

全力控人形臂
Marvin Pro
让机器人像人类一样探索世界
极致精度
固定式刚性结构,重复定位精度
±0.03mm,专攻工业装配与
科研实验
产品特性
Marvin Pro
全能力控
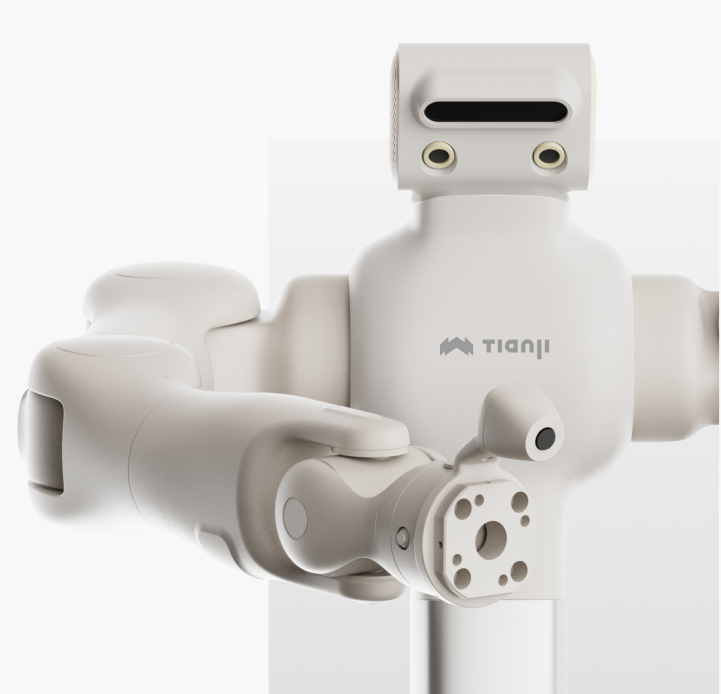
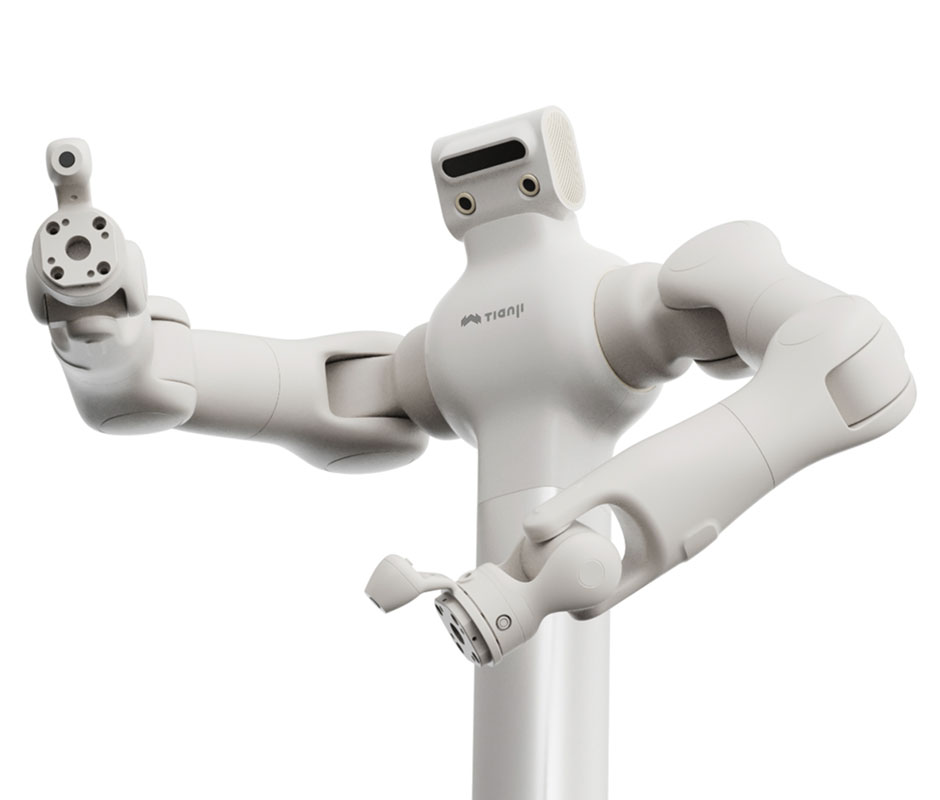
14自由度双臂,支持柔顺阻抗控制与碰撞保护,单臂负载6kg,动作拟人安全

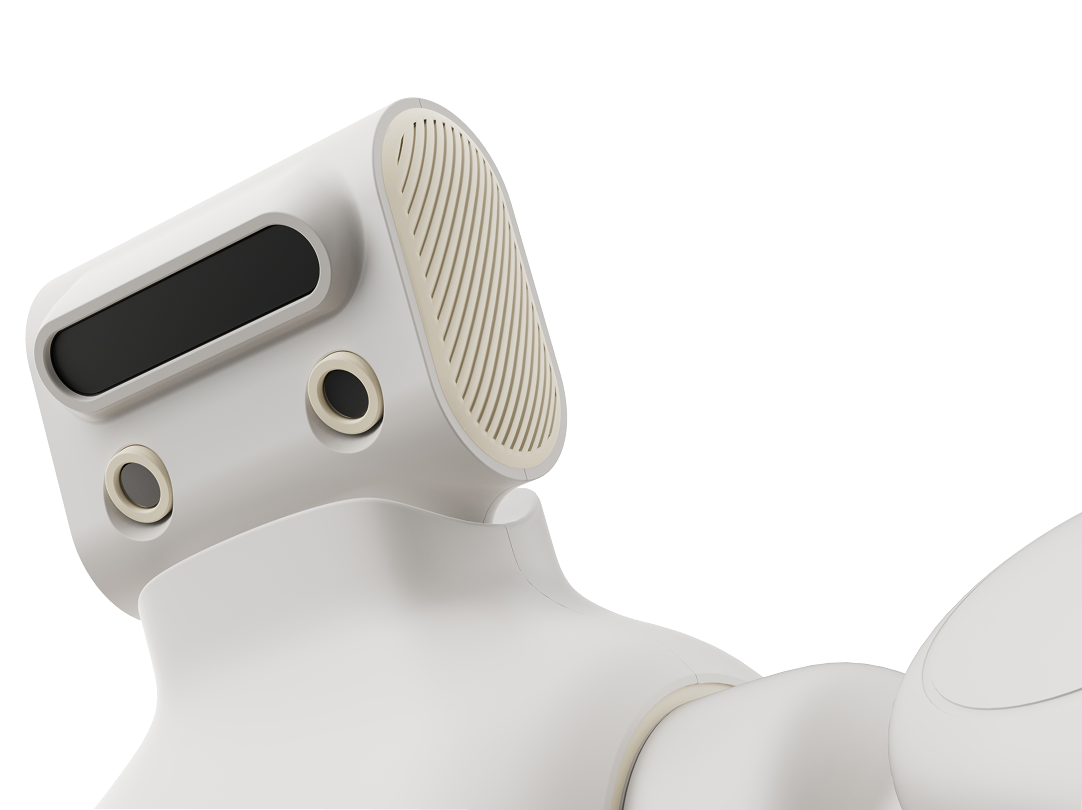
标配视觉
自带5目全景相机(头3腕2),无死角覆盖视觉定位、点云采集与轨迹引导
强大算力
最强大脑搭载 NVIDIA Jetson Orin AGX 64G(275TOPS)算力平台,
支撑高精度视觉处理、数据采集、深度学习、运动控制算法运行。
全面支持 ROS2 开源框架,即插即用,开发友好。


核心价值
舍弃移动冗余,以更低成本提供最高精度的固定工位双臂作业方案。

核心价值
舍弃移动冗余,以更低成本提供最高精度的固定工位双臂作业方案。

核心价值
舍弃移动冗余,以更低成本提供最高精度的固定工位双臂作业方案。
| 参数项 | Marvin Pro+M3 | Marvin Pro+M6 |
|---|---|---|
| 臂型自由度 | 7DoF×2,标配关节力控 | 7DoF×2,标配关节力控 |
| 单臂额定负载 | 3kg | 6kg |
| 单臂最大负载 | 5kg | 10kg |
| 工作半径 | 615mm | 695mm |
| 重复定位精度 | ±0.03mm | ±0.03mm |
| 作用力重复精度 | 0.15N | 0.15N |
| 最大关节速度 | J1-J7:180°/s | J1-J7:180°/s |
| 控制方式 | 位置控制、阻抗控制、力位混合控制 | 位置控制、阻抗控制、力位混合控制 |
| 通讯协议 | 1Khz EtherCAT | 1Khz EtherCAT |
| 制动方式 | 全关节抱闸 | 全关节抱闸 |
| 末端接口 | RS485、CAN、EtherCAT | RS485、CAN、EtherCAT |
| 末端六维力传感器 | 选配 | 选配 |
| 末端灵巧手 | 选配 | 选配 |
| 整机基础参数 | 参数项 | 规格 |
|---|---|---|
| 整机自由度 | 14DoF(不含灵巧手,7DoFX2双臂) | |
| 基座类型 | 固定高度刚性支架 | |
| 头部 | 不可动,无运动自由度 | |
| 垂直工作空间 | 0.6-1.8m | |
| 整机重量 | 约80kg | |
| 力控系统 | 双臂标配全力控 | |
| 通信接口 | WiFi、EtherNet |
| 视觉相机系统 | 型号与数量 | 功能 |
|---|---|---|
| 头部 | D435 RGBD ×1SH5WG RGB ×2 | 环境感知、全局定位、点云采集、目标识别 |
| 腕部 | SH5WG RGB ×2 | 末端精定位、工件检测、操作视觉引导 |
| 总计 | 5台相机 | 全系标配,无选配 |
| 算力平台参数 | 参数项 | 规格 |
|---|---|---|
| 主控平台 | NVIDIA Jetson Orin AGX 64G(275TOPS) | |
| CPU | 12核,最大频率2.2GHz | |
| GPU | 最大频率1.3GHz |
| 电气参数 | 参数项 | 规格 |
|---|---|---|
| 供电方式 | 市电直供(AC220V)/适配海外电压 | |
| 工作时长 | 24小时不间断连续工作 | |
| 充电/电池 | 无(固定供电,无电池模块) |
| 遥操系统 | 参数项 | 规格 |
|---|---|---|
| 平台定位 | Marvin6-Apex遥操系统 | |
| 控制模式 | 位置模式+阻抗模式 | |
| 控制频率 | 500Hz | |
| 数据采样频率 | 500Hz | |
| 通讯方式 | 以太网/CAN-FD | |
| ROS | 支持ROS2 | |
| 数据格式 | HDF5、RLDS | |
| 端到端延迟 | ≤100ms | |
| 自由度数量 | 16DOF | |
| 功耗 | 300W(平均),600W(峰值) | |
| 工作电压范围 | 48V(±15%) | |
| 图像分辨率 | 2560*720 | |
| 图像帧率 | 30FPS | |
| 透传 | 支持 | |
| 适配灵巧手平台 | 舞肌、sharpa、强脑等 | |
| 可选配末端执行器 | 视触觉夹爪 |