
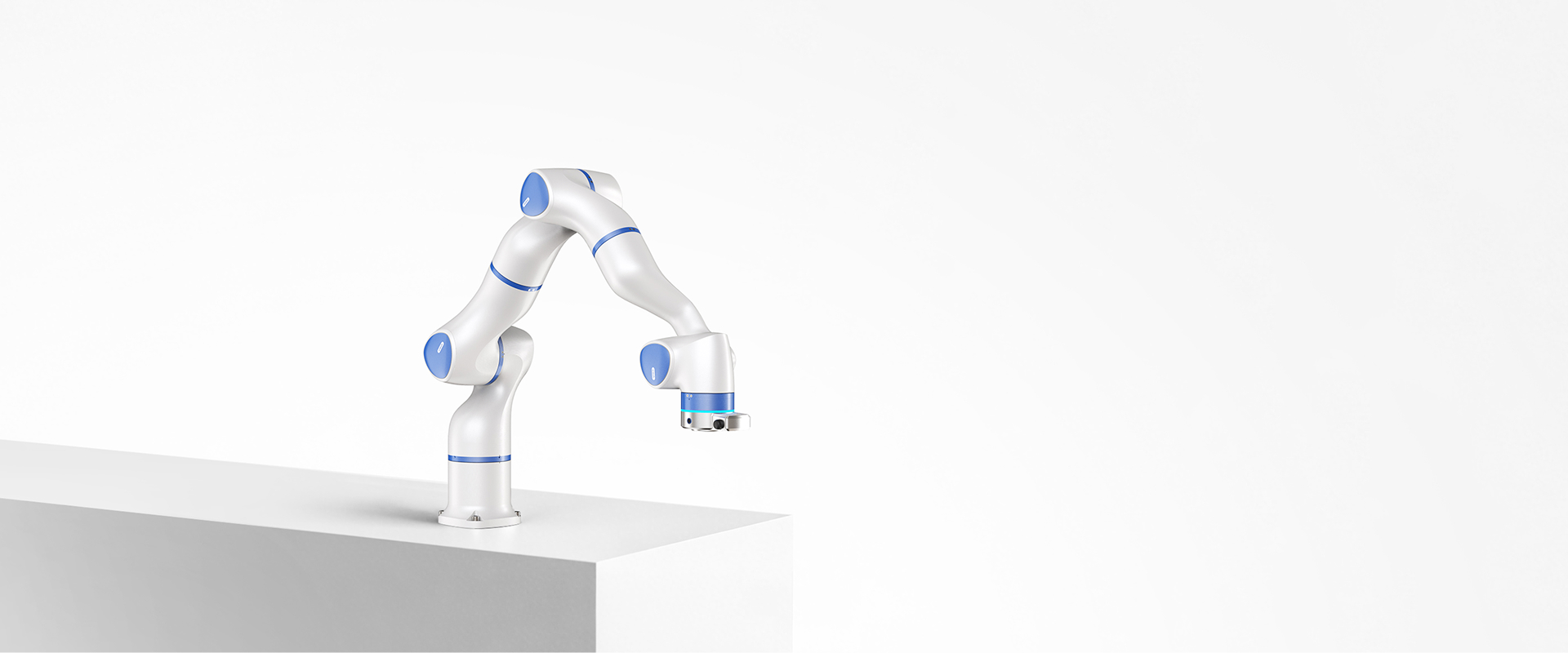
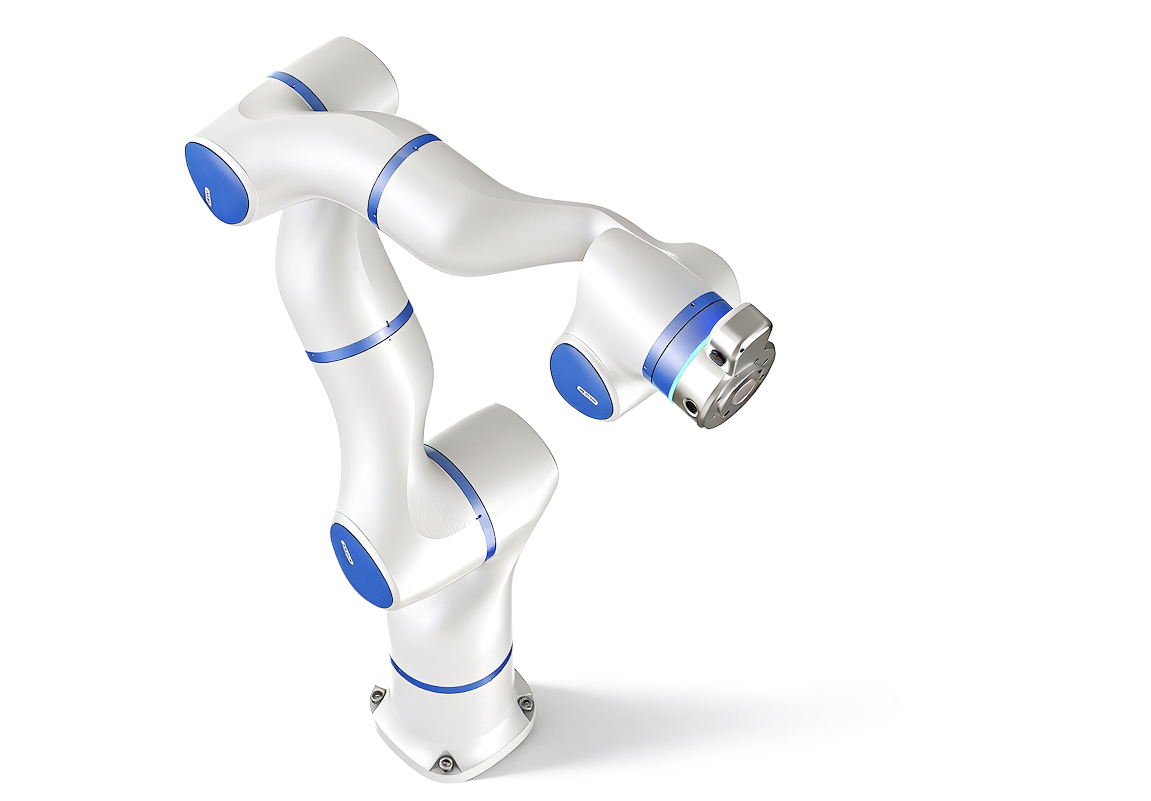
人机协作机器人
Pilot 系列
7轴协作机器人
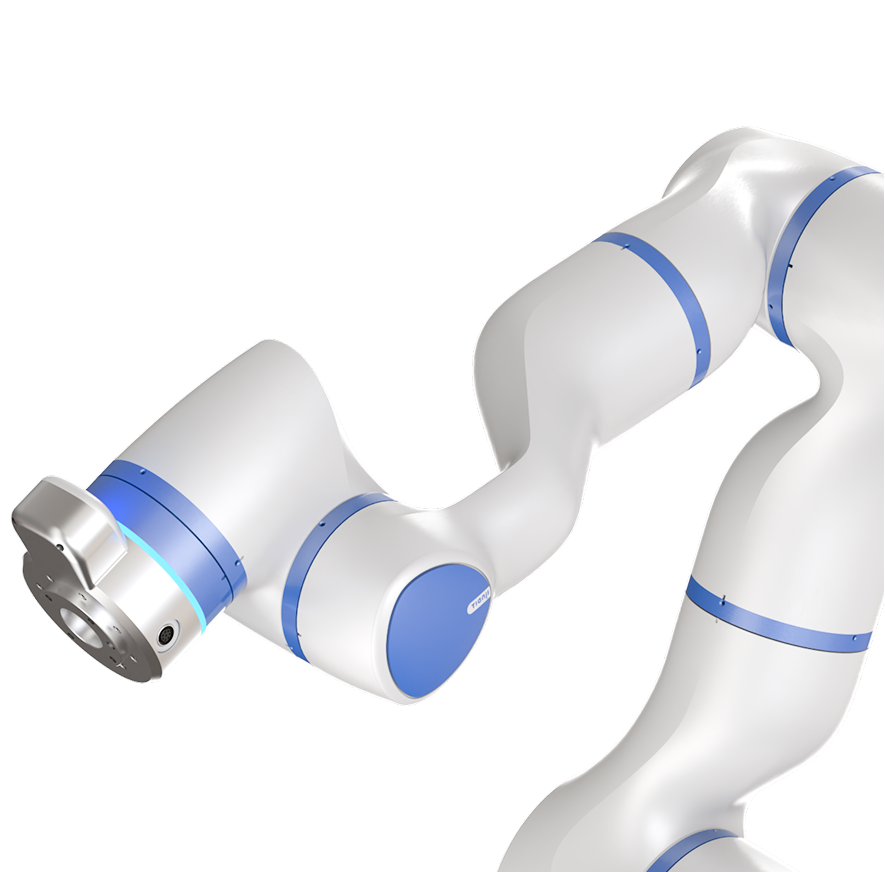
自研关节力传感器,铸就
一流力控感知
综合精度提升至0.2%FS以内,扭转刚性提升1.5倍
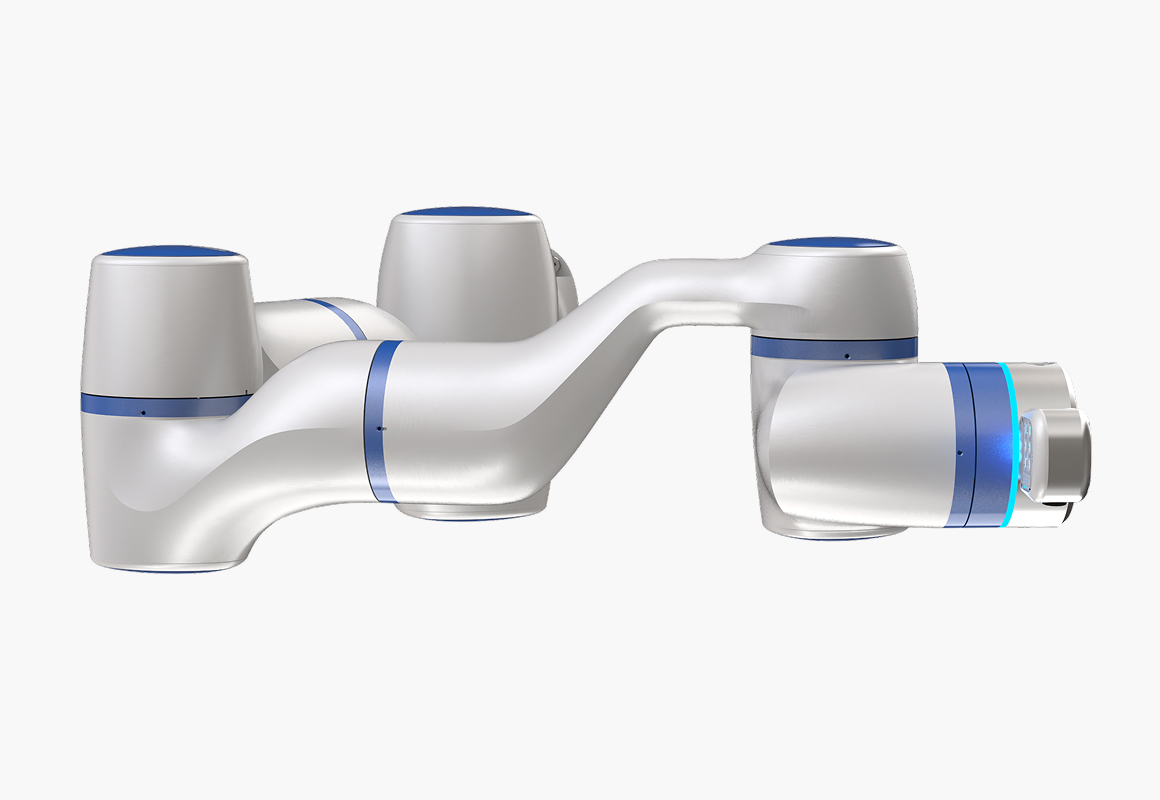
产品特性
Pilot Series

工业与商业的
完美结合体
稳停特性+刚性升级 打造适应工业场景的协作机器人
灵动手柄
高灵敏度拖动示教+末端精细微调+点位编辑按键下一代控制系统与示教的交互方式
碰撞检测自优化
更少的编程人力投入 ,更安全的工作场景


防夹手设计
保护拖动模式,避免二次伤害
| 本体参数 | PILOT 3 | PILOT 7 | |
|---|---|---|---|
| 动作范围 | 716mm | 1066mm | |
| 最大负载 | 3kg | 7kg | |
| 重复定位精度 | ±0.03mm | ±0.03mm | |
| 质量 | 6.5kg | 36kg | |
| 防护等级 | IP50 | IP54 | |
| 安装方法 | 任意角度 | 任意角度 | |
| 运动范围 | J1 | +170° | +170° |
| J2 | ±120° | ±120° | |
| J3 | +170° | +170° | |
| J4 | -70°/+150° | -170°/+80° | |
| J5 | +170° | +170° | |
| J6 | 士120° | -170%/+90° | |
| J7 | 土170° | 土170° | |
| 最大速度 | J1 | 180°/s | 180°/s |
| J2 | 180°/s | 180°/s | |
| J3 | 180°/s | 180°/s | |
| J4 | 180°/s | 180°/s | |
| J5 | 180°/s | 225°/s | |
| J6 | 180°/s | 225°/s | |
| J7 | 180°/s | 225°/s |
| 控制柜参数 | 参数项 | 规格 |
|---|---|---|
| 外型尺寸 | 320(宽)x150(高)x422(深) | |
| 位置控制方式 | 绝对值编码器 | |
| 毛重 | 9kg | |
| 防护等级 | IP20 | |
| 加减速控制方式 | 软件伺服控制 | |
| 接地 | 工作接地(接地电阻100Q以下)专用接地 | |
| 输入输出信号 | 标配16DI,标配16DO | |
| 电源规格 | 输入单相AC220V(±10%)50/60Hz(±2%),输出DC48V(士10%) | |
| 通讯接口 | 以太网TCP/IP标配、EtherCAT标配 |